 |
What is the maximum voltage I can run MultiGov at?
As long as you have the "RPM Select" input connected to your
receiver, you can run MultiGov up to 11 volts. If you are
using only one speed and have the jumper installed, you can go up to
7 volts.
Note that you still need to make sure that your throttle servo can
handle higher voltages. Depending on your servo, you may need
to regulate/drop-down the power going to the servo.
|
|
|
How do I mount the RPM sensor on my T-Rex 600 Nitro?
Please click here for
step-by-step instructions.
|
|
|
How can I reduce the amount of overspeeding during unloading
of the rotor?
You can decrease the "LowThrotPcnt" basic configuration option
so that the lowest throttle position MultiGov will go is lower.
The default setting is 30% above idle. You can try to lower it
to the 20-25% range. The downside to having this setting too
low is that you may not have consistent smoke/motor noise.
Depending on your helicopter, you may also run the risk of
disengaging the clutch during flight if set too low which is not
good.
Another
option is to increase the “BaseGain” value to see if that helps.
Try increasing “BaseGain” by 10-15 point increments.
|
|
|
I am experiencing some periodic motor surging/oscillations in
hover. Alternatively, the motor does not seem to run smoothly
during hard flight. What should I do?
Possible solutions are:
1) Double check that the sensor is securely mounted and that the
magnet moves directly over it.
2) This could happen if your motor needles are too rich.
Try leaning out the needle settings.
3) If you are running in full governor mode, try turning OFF the
"Digit. Servo" mode if you have it ON.
4) If that doesn't help, go the Advanced Configuration menu and
try decreasing the "GainAgres" value by 1.
|
|
|
How do I
get more
recovery power for fast pitch pumping 3D maneuvers?
You can increase the "LowThrotPcnt" basic configuration option
so that the lowest throttle position MultiGov will go when
controlling overspeeding is higher. This can improve RPM
recovery for fast pitch changes. Adjust to your liking.
A good value might be in the 35-45% range. You may experience
more overspeeding the higher you make this value.
From our testing and
feedback, this is more beneficial for .91 sized motors. If you
are running a OS .50 Hyper motor, going beyond the default setting
is not usually needed since the OS .50 Hyper typically runs a high
RPM at low throttle.
|
|
|
What should I do if
I hear a motor "hiccup" after I unload the rotor?
Try and lean out the low/mid throttle needles to see if it gets
rid of the problem.
Optionally, your motor may have a rough spot around the low throttle range
which causes the hiccup. You can avoid the rough spot by
increasing "LowThrotPcnt".
|
|
|
When I do a throttle hold and then abort the throttle hold,
the rotor speed spools back up too slowly. What can I do?
When you do a throttle hold and the rotor speed drops very low,
the slow startup is re-engaged when you abort the throttle hold.
To have the rotor speed startup faster, set the "Startup Speed"
value higher in the "Advanced Configuration" options.
Increase to your liking.
|
|
|
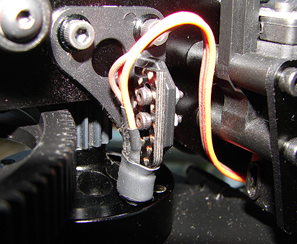
How can I mount the RPM sensor
on a Synergy helicopter?
Simply use a dremel to cut down one of carbon fiber mounting
brackets and screw it onto the existing governor mount that comes
with the Synergy kit like this:
 . .
|
|
|
